
АРКОДИМ испытала опытный образец высокоточного российского коллаборативного робота
-

- © robotrends.ru

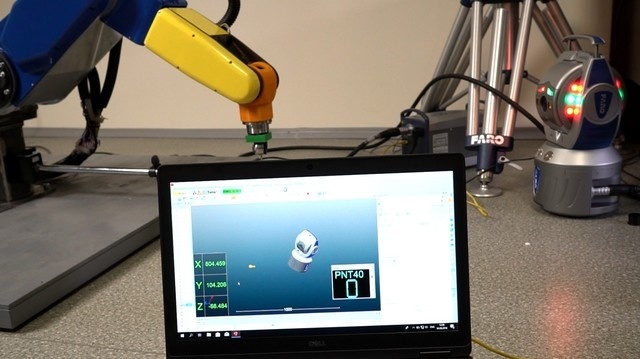
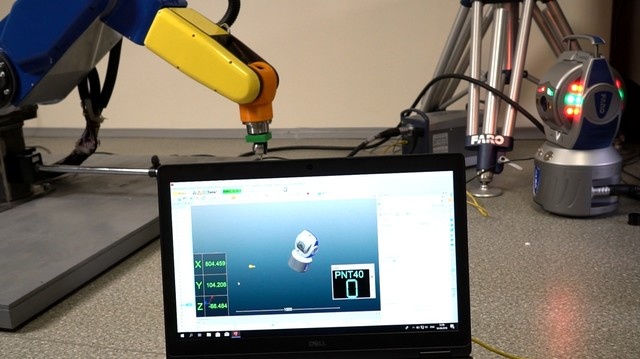
Особенность шестиосевого сверхточного промышленного робота ARKODIM, разрабатываемого совместно с Университетом Иннополис — высокая повторяемость. Она достигается за счет перехода к использованию двойного энкодирования.
Технология использования системы двойных энкодеров появилась в мире совсем недавно. Каждый производитель, который начал ее применение, реализовал свои алгоритмы работы с новой технологией. Для российских разработчиков — это возможность уменьшить разрыв с ведущими мировыми производителями, которые десятки лет работают на рынке.
©Видео с youtube.com/ https://www.youtube.com/embed/S25ak7QizfU
Генеральный директор ООО «АРКОДИМ» Артём Барахтин рассказал RoboTrends.ru о сути разработки:
«Робота приводят в движение серводвигатели, крутящий момент которых передается на исполнительное звено посредством редукторов. На валу каждого серводвигателя есть встроенный внутренний энкодер, который сообщает контроллеру робота положение вала. Теоретически, зная положение вала в любой конкретный момент времени, контроллер „понимает“ положение маниупулятора в пространстве. Это „классическая“ схема. К сожалению, теория отличается от практики.
На практике у любого редуктора есть люфт. У новых он „заводской“ и обусловлен особенностями конструкции и производства. Со временем люфт растет за счет изнашивания элекментов редуктора. С этим можно бороться, внося в программное обеспечение корректировку „заводского“ люфта. Возможности такого подхода ограничены, поскольку разные редукторы могут отличаться различным износом. Вдобавок на точность позиционирования влияют такой эффект, как деформация корпуса робота и редукторов под нагрузкой.
Для решения всех этих проблем на исполнительные звенья робота монтируют дополнительные энкодеры. Теперь алгоритм, обеспечивающий вычисление положения робота выглядит так:
- Контроллер дает команду валу серводвигателя провернуться N раз. После заданного числа поворотов вала, робот должен находиться в некой расчетной точке. Но не находится из-за люфтов редуктора и деформаций корпуса и редукторов под нагрузкой.
- При движении исполнительных звеньев робота, контроллер получает данные не только от внутренних, но также и от внешних энкодеров, обеспечивающих информацию о реальном положении робота в пространстве.
- Сравнение информации, получаемой с внешнего и внутреннего энкодеров, позволяет определить деформацию редуктора. Зная его коэффициент жесткости, можно определить момент, возникающий в суставе робота. Повторяя эти операции по всем двигателям, можно получить величину силы, приложенной к исполнительному органу. Это позволяет оценить деформацию не только в редукторах, но также в корпусе робота. Дальше дело техники — получить поправочные коэффициенты, позволяющие компенсировать суммарные ошибки повторения программным способом. Контроллер „на лету“ рассчитывает поправочные коэффициенты и применяет их для управления роботом. Анализ реального положения дел и корректировка происходят постоянно в процессе работы робота, что значительно повышает точность позиционирования и повторяемость».
Чем эта российская разработка отличается от разработок других производителей. Например, местом установки второго энкодера. Кто-то ставит его сразу после редуктора, — это позволяет устранить погрешности, связанные с люфтом, но не учитывает деформации корпуса под нагрузкой. В ARKODIM второй энкодер решили ставить на корпус звена робота — это дает возможность оценить интегральную погрешность, включающую учет деформации корпуса.
У робота даже с двойным комплектом энкодеров калибровка заводская. При работе с различными нагрузками такой робот испытывает различные деформации, что влияет на точность его позиционирования при перемещениях. ARKODIM калибрует себя непрерывно в процессе работы. Каждый пройденный миллиметр дает информацию для калибровки прохождения следующего миллиметра — в реальном времени. Таким образом удается устранить влияние груза и заданной траектории на точность движений робота. Такого робота можно задействовать в технологическом процессе, где требуется с высокой точностью перемещать предметы разного веса.
«Предпатентный поиск показал, что наш робот тянет на изобретение», — добавляет Артем Барахтин. «Испытания показали, что опытный образец робота уверенно держит десятую долю миллиметра по всем трем направлениям. И это лишь первые испытания».
-
- © robotrends.ru
В России нередко рождаются передовые идеи, делаются изобретения. Иногда дело доходит даже до действующего образца, существенно превосходящего конкурентов. А вот довести свое изобретение до массового промышленного производства, получить заказы, обеспечить внедрение и сервисную поддержку своих продуктов — удел немногих. Хочется верить, что у ООО «АРКОДИМ» это получится и мы еще увидим высокоточные коллаборативные роботы российского производства на российских предприятиях.
Кстати, а вы знали, что на «Сделано у нас» статьи публикуют посетители, такие же как и вы? И никакой премодерации, согласований и разрешений! Любой может добавить новость. А лучшие попадут в наш Телеграм @sdelanounas_ru. Подробнее о том как работает наш сайт здесь👈
Другие публикации по теме
- «Технополис Москва» — крупнейший центр разработок ро...p;предметам и позволит двигать пальцами независимо друг от друга.
- Робот-собака в кинематической симуляции (Сервосила)Компания Сервосила предс...траняется со всеми сервоконтроллерами производства компании Сервосила.
- В октябре в Санкт-Петербурге состоялось крупнейшее и яркое м...кие навыки, а еще выдержку и способность работать в команде.


Поделись позитивом в своих соцсетях
Комментарии 0