
Экраноплан с водомётным движителем
Рассматривается создание экраноплана для перемещения над поверхностью воды с помощью водомётного движителя, обладающего высокой продольной и путевой статическими устойчивостями, а также высокой продольной и путевой управляемостью на всех режимах движения.
Экраноплан с водомётным движителем относится к области транспортных средств на динамической воздушной подушке и касается создания экранопланов для перемещения над поверхностью воды.
Имеются экранопланы, которые в полетном режиме имеют возможность поддержания своей массы над поверхностью земли или воды благодаря динамической воздушной подушке возникающей за счет аэродинамического экранного эффекта. Однако такие экранопланы, не имеющие в полётном режиме физического контакта с поверхностью воды, приводятся в движение с помощью воздушных движителей, например, воздушно-винтовых, воздушно-реактивных двигателей. Поскольку плотность воздуха, используемого в качестве рабочего тела в воздушных движителях, почти в 800 раз меньше плотности воды, используемого в качестве рабочего тела в водных движителях (гребной винт, водомётный движитель), экономичность воздушных движителей очень сильно уступает экономичности водных движителей. В связи с этим, в предлагаемом устройстве и его аналогах используется водомётный движитель в качестве основного движителя, который используется для создания основной силы тяги экраноплана.
Для обеспечения устойчивого движения любого экраноплана, и в частности предлагаемого устройства, необходимо обеспечение
продольной, поперечной и путевой статической устойчивости.
Поперечная статическая устойчивость — это способность экраноплана
возвращаться в положение равновесия после случайного накренения,
Как указано в источнике [1] на стр. 188, водомётный движитель или
кратко просто водомёт, судовой движитель, у которого сила,
движущая судно, создаётся выталкиваемой из него струёй воды.
Водомётный движитель представляет собой профилированную трубу
(водовод), в которой водяной поток ускоряется лопастным
механизмом (гребной винт, крыльчатка насоса), энергией сгорания
топлива или давлением сжатого газа и обеспечивается направленный
выброс струи. Назовём часть водовода водомёта, через которую
поступает вода в водомёт — водозаборником, а ту часть водовода
водомёта, через которую вода, ускоряемая в водомёте,
выталкивается за пределы водомёта — соплом. Под приёмным
отверстием водомёта будем понимать сечение водозаборника, через
которое в неё поступает вода, а под выходным сечением водомёта —
сечение сопла, через которое происходит выброс воды из водомёта.
Вода поступает в водовод через приёмное отверстие, которое
всегда располагается ниже уровня воды. Обычно, согласно
источнику [2] (стр.10), реакция струи, выбрасываемой водомётом,
направлено в сторону, противоположную движению судна, и является
силой, движущей судно. Экраноплан с водомётным движителем (далее
сокращённо ЭВД) может иметь в своём составе не один, а несколько
водомётов, которые обеспечивают своей работой разгон, взлёт
(отрыв устройства от поверхности воды, кроме водозаборников самих
этих водомётов) и поддержание ЭВД в основном режиме движения
(основным режимом движения транспортного средства на динамической
воздушной подушке, по источнику [2] будем называть режим движения
после его взлёта и движение со скоростями близкими к полной
скорости хода). Такие водомёты располагаются в хвостовой части
фюзеляжа и имеют полнонапорные водозаборники. В соответствии с источником [2] (стр.170), полнонапорным водозаборником является
водозаборник у которого плоскость приёмного отверстия нормальна
движению судна. Полнонапорный водозаборник выполняется плавно
обтекаемой формы для уменьшения сопротивления от набегающего
потока. Постоянно смоченной называется та часть полнонапорного
водозаборника водомёта, которая остаётся под поверхностью воды
при любом режиме движения ЭВД. Постоянно смоченная вертикальная
часть полнонапорного водозаборника,
В соответствии с первым законом Ньютона и как указано в источнике
[3] (стр. 58, 59) условием установившегося прямолинейного полёта
является равновесие всех действующих на транспортное средство сил
и моментов. Поскольку ЭВД, как и другие транспортные средства,
обладает симметрией относительно продольной плоскости, то силы и моменты относительно продольной плоскости уравновешены. Поэтому
условием равновесия ЭВД является продольное равновесие —
равновесие всех сил и моментов, действующих на ЭВД, в продольной
плоскости, которое может выражаться в двух условиях: 1) сумма
продольных моментов всех сил относительно центра тяжести ЭВД
равна нулю; 2) суммы проекций всех сил на продольную ось и вертикальную ось, расположенные в продольной плоскости, равны
нулю. Первое из этих условий — определяющее, поскольку при его
выполнении второе условие также будет выполнено. Помимо
продольного равновесия для устойчивого полёта летательного
аппарата, экраноплана и ЭВД, как было сказано выше, необходимо
обеспечение продольной, поперечной и путевой статической
устойчивости. Самой сложной и главной проблемой экранопланов
является обеспечение продольной статической устойчивости.
Согласно источнику [3], продольная статическая устойчивость
может быть обеспечена, если центр тяжести всего летательного
аппарата будет находиться впереди центра давления крыла.
Существуют самолеты, выполненные по нормальной (или классической
«самолетной») схеме, у которого крыло, создающее основную
подъёмную силу, установлено впереди горизонтального
стабилизатора, а центр масс всего летательного аппарата находится
впереди центра давления крыла. При этом продольное равновесие
(балансировка) обеспечивается горизонтальным стабилизатором с отрицательным углом атаки, расположенным за крылом в задней части
фюзеляжа. Как известно положительный угол атаки обеспечивает
подъёмную силу направленную вверх, а отрицательный угол атаки —
подъёмную силу направленную вниз. Крыло имеет положительный угол
атаки. В основном экранопланы выполняются по такой же схеме. ЭВД
также имеет такую нормальную классическую схему, но отличается от других экранопланов тем, что горизонтальный стабилизатор
находится на постоянно смоченной части полнонапорного
водозаборника на одном или нескольких водомётах расположенных в хвостовой части фюзеляжа. Под центром масс всего ЭВД
понимается общий центр масс всех составных частей ЭВД, включая
воду находящуюся внутри водомётов над уровнем воды в водоёме.
Ввиду того, что для самолёта подъёмная сила фюзеляжа
незначительна в сравнении с подъёмной силой крыла, её влияние на устойчивость самолёта незначительна. Но поскольку для экраноплана
подъёмная сила фюзеляжа может составлять значительную часть от подъёмной силы всего экраноплана, то поэтому центр масс всего
экраноплана с водомётным движителем находится впереди общего
центра давления крыла и фюзеляжа,
В одном из вариантов предлагаемого устройства у водомётных
движителей с полнонапорным водозаборником, расположенных в хвостовой части фюзеляжа площадь сечения водовода у лопастного
механизма больше площади сечения у приёмного отверстия
водомётного движителя. Это означает, что площади поперечных
сечений водовода от приёмного отверстия водомёта до лопастного
механизма плавно увеличиваются. Плавное изменение сечений
обеспечивает минимальное сопротивление. С увеличением скорости
ЭВД увеличивается скорость набегающего потока воды проходящего
через приёмное отверстие водомёта. При прохождении воды
через водовод из-за гидравлического сопротивления часть её кинетической энергии будет безвозвратно теряться. И чем больше
входная скорость воды в водомёт, тем большая часть её первоначальной энергии будет теряться. Если же сечение вдоль
водовода от приёмного отверстия до лопастного механизма
увеличивается, то, согласно уравнению Бернулли, скорость потока
при этом будет замедляться, а давление будет увеличиваться,
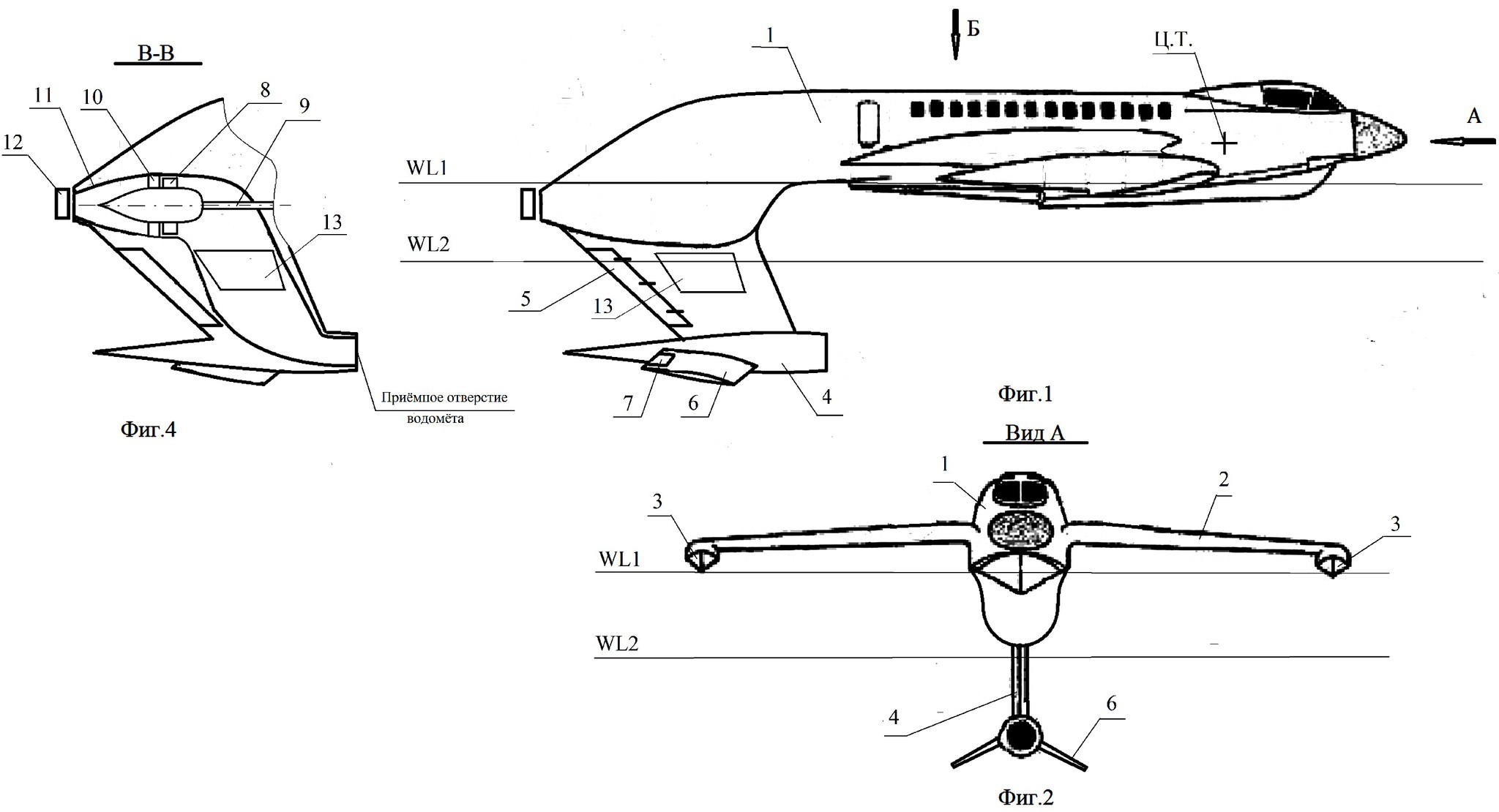
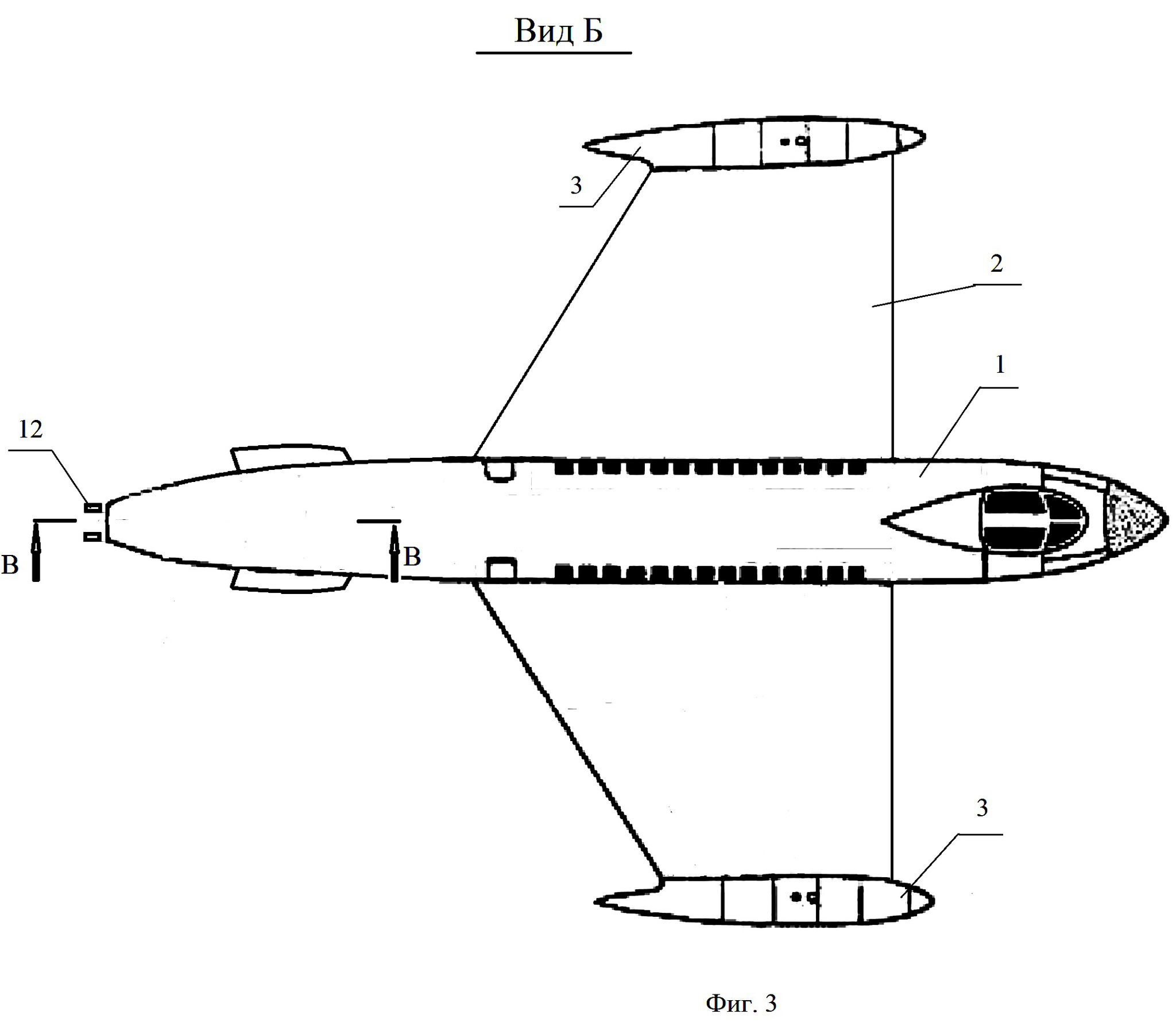
Сущность устройства поясняется чертежами, где на фиг.1 схематически показан предлагаемый ЭВД (вид сбоку), на фиг.2 — вид по, А на фиг.1 и на фиг.3 — вид по Б на фиг.1 (вид сверху на ЭВД), фиг.4 — разрез В-В на Фиг.3.
На этих фигурах позицией WL1 обозначено положение ватерлинии, когда ЭВД неподвижно или перемещается с низкой скоростью по поверхности воды, и позицией WL2 положение ватерлинии, когда ЭВД перемещается с полной скоростью хода на основном режиме движения.
ЭВД имеет фюзеляж поз.1, к которому с обеих сторон прикреплены
две половины крыла поз.2, представляющие собой вместе единую
прочную конструкцию (Фиг.1). На концах крыла имеются
водоизмещающие корпуса поз.3. Нижняя часть фюзеляжа поз.1 имеет
форму водоизмещающего судна, обеспечивающее минимальное
сопротивление при движении ЭВД по поверхности воды. Фюзеляж поз.1
совместно с корпусами поз.3 обеспечивают устойчивую плавучесть,
при нахождении ЭВД в покое и минимальное сопротивление при
движении его на режиме разгона или перемещения по поверхности
воды. В хвостовой части фюзеляжа установлен водомёт с полнонапорным водозаборником поз.4. В вертикальной задней части
водозаборника поз.4 имеется вертикальный руль поз.5. В нижней
части водозаборника поз.4 располагается стреловидный
горизонтальный стабилизатор поз.6 с горизонтальными рулями поз.7.
Причём две половины горизонтального стабилизатора поз.5 имеют
отрицательный угол поперечного V крыла,
Работа ЭВД осуществляется следующим образом. В начале ЭВД находится в покое на ватерлинии WL1. Как видно на Фиг.1 водомёт при этом практически полностью заполнен водой. После запуска водомётного движителя, благодаря тяге водомётного движителя начинается разгон ЭВД. При этом откидывающиеся стенки поз.13 открыты. Далее в процессе разгона скорость ЭВД достигает значения, при котором площадь входного сечения водомёта становиться достаточной для эффективной работы водомёта и откидывающиеся стенки поз.13 принудительно закрываются с помощью привода. По достижении скорости ЭВД, достаточной для его взлёта, подъёмная сила крыла поз.2 обеспечивает отрыв и подъём ЭВД над водной поверхностью на достаточную высоту с ватерлинией WL2. Регулирование высоты полёта ЭВД над поверхностью воды осуществляется горизонтальными рулями поз.7. управление ЭВД по курсу осуществляется рулями поз.12 совместно с вертикальным рулём поз.5. В случае, если под влиянием какого-либо возмущения увеличится угол атаки ЭВД, угол атаки горизонтального стабилизатора поз. 6 уменьшится по величине и соответственно хвостовая часть ЭВД начнёт подниматься вверх, а угол атаки ЭВД при этом будет уменьшаться до первоначальной величины. При случайном уменьшении угла атаки ЭВД, всё происходит наоборот. Таким образом, обеспечивается продольная статическая устойчивость ЭВД. Поскольку две плоскости горизонтального стабилизатора поз.5 имеют отрицательный угол поперечного V крыла, то при возникновении, под действием возмущающего воздействия, угла крена та плоскость, которая будет выше другой, будет иметь больший угол атаки, чем другая. Вследствие этого на плоскостях горизонтального стабилизатора возникнет момент сил, стремящийся уменьшить угол крена и обеспечивающий поперечную статическую устойчивость. Вертикальная часть водозаборника являясь вертикальным стабилизатором расположена в задней части ЭВД. При отклонении ЭВД от курса на вертикальном стабилизаторе возникает боковая сила стремящаяся возвратить ЭВД на прежний курс. Таким образом, обеспечивается путевая статическая устойчивость.
- Большая Советская Энциклопедия. (В 30 томах). Гл. ред. А.М. Прохоров. 3-е изд. М., «Советская Энциклопедия», 1971. Т. 5. Вешин- Газли. 1971. 640 с.
- Русецкий А.А., Жученко, М.М., Дубровин О.В. Р88. Судовые движители. Л., «Судостроение», 1971. 288с.
- Капковский Я. К20. Летающие крылья / Пер. с польск. Ю. П. Терехова.-М.: ДОСААФ, 1988.-127 с.
Хочешь всегда знать и никогда не пропускать лучшие новости о развитии России? У проекта «Сделано у нас» есть Телеграм-канал @sdelanounas_ru. Подпишись, и у тебя всегда будет повод для гордости за Россию.



20.03.1601:40:08
21.03.1620:33:34
12.01.1723:58:07